|
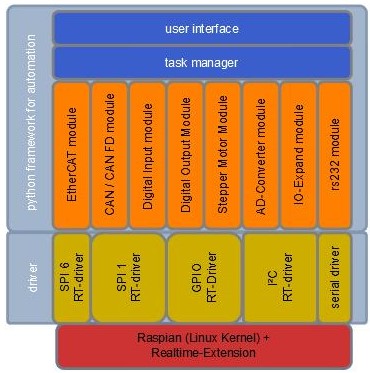
drb-io is a software platform for Python-based control of hardware peripherals such as digital input/output and analog input. All peripheral Python-modules sit on top of the respective realtime-drivers. For example the CAN FD module uses SPI1 RT-Driver to communicate to CAN controller MCP2518FD. As the modules are python coded, drb-io itself is not hard-realtime capable.
|
 |
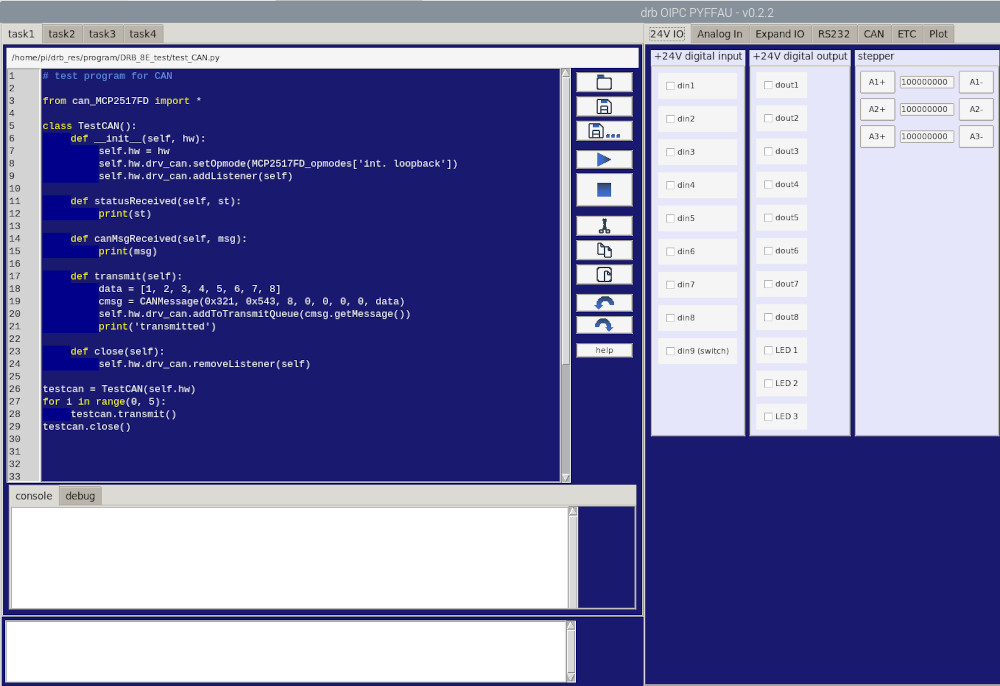
| This screenshot shows the code editor on the left and the available peripherls as tabbed pane on the right. | drb-io GUI |
| This screenshot shows CAN FD message management on the right tabbed pane. | drb-io CAN FD |
|
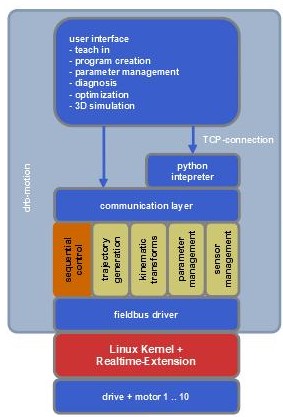
drb-motion is a Linux-based software platform for realtime multi-axis direct and path motion control. Example features
Driver interfaces
|
|
{kind=link}
{kind=link}
|
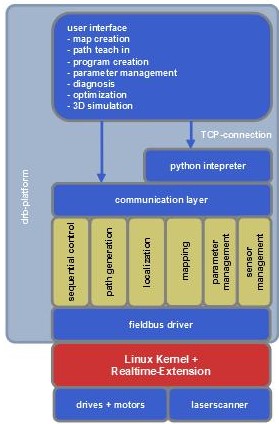
drb-platform is a Linux-based software platform for realtime mobile robot control. Example features
Scanner interfaces
|
 |